



1. Иерархическая трехуровневая структура АСУ ТП
Чаще всего распределенные АСУ ТП имеют трехуровневую структуру. Пример структурной схемы комплекса технических средств такой системы приведен на рисунке 1.
На верхнем уровне с участием оперативного персонала решаются задачи диспетчеризации процесса, оптимизации режимов, подсчета технико-экономических показателей производства, визуализации и архивирования процесса, диагностики и коррекции программного обеспечения системы. Верхний уровень АСУ ТП реализуется на базе серверов, операторских (рабочих) и инженерных станций.
На среднем уровне — задачи автоматического управления и регулирования, пуска и останова оборудования, логико-командного управления, аварийных отключений и защит. Средний уровень реализуется на основе ПЛК.
Нижний (полевой) уровень АСУ ТП обеспечивает сбор данных о параметрах технологического процесса и состояния оборудования, реализует управляющие воздействия. Основными техническими средствами нижнего уровня являются датчики и исполнительные устройства, станции распределенного ввода/вывода, пускатели, концевые выключатели, преобразователи частоты.
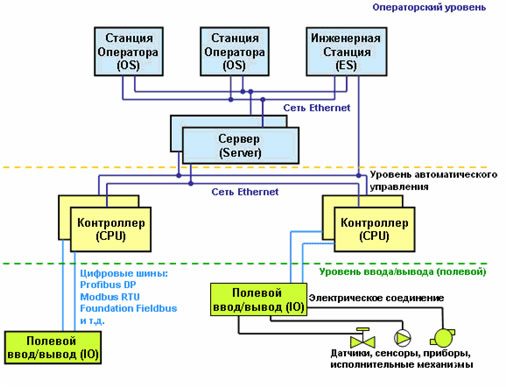
Рис.1 Пример структурной схемы распределенной АСУ ТП
2. Уровень ввода/вывода (полевой уровень)
Входные сигналы от датчиков и управляющие воздействия на исполнительные механизмы могут подаваться непосредственно на ПЛК (поступать от ПЛК). Однако если ТОУ имеет значительную территориальную протяженность, это потребует длинных кабельных линий от каждого устройства к ПЛК. Такое техническое решение может оказаться не рациональным по двум причинам:
- высокая стоимость кабельной продукции;
- возрастание уровня электромагнитных помех с ростом длины линий.
Более рациональным в такой ситуации является использование станций распределенной периферии, располагающихся в непосредственной близости к датчикам и исполнительным механизмам. Такие станции содержат необходимые модули ввода и вывода, а также интерфейсные модули для подключения к ПЛК через цифровую полевую шину (например, с использованием протокола Profibus DP, или Modbus RTU). Цифровая передача всех сигналов осуществляется по одному кабелю с высоким уровнем помехозащищенности. К полевой шине могут непосредственно подключаться также так называемые интеллектуальные датчики и исполнительные устройства (имеющие в своем составе контроллеры и другие блоки, обеспечивающие преобразование сигнала в цифровую форму и реализующие обмен данными через полевую шину).
Упрощенная схема ввода/вывода с использованием станции распределенной периферии приведена на рисунке 2. Полевая шина Profibus DP (Process field bus Distributed Periphery) позволяет соединить до 125 устройств, до 32 на сегмент (ПЛК, станций распределенной периферии, интеллектуальных датчиков и исполнительных устройств). Станция распределенной периферии состоит из трех основных компонент:
- базовой панели (Baseplate), на которую в специальные слоты устанавливают модули ввода/вывода и интерфейсные модули, или специальной профильной рейки, на которую крепятся модули;
- модулей ввода/вывода (I/O Modules);
- интерфейсных модулей (Interface modules), обеспечивающих обмен данными с ПЛК через цифровую полевую шину.
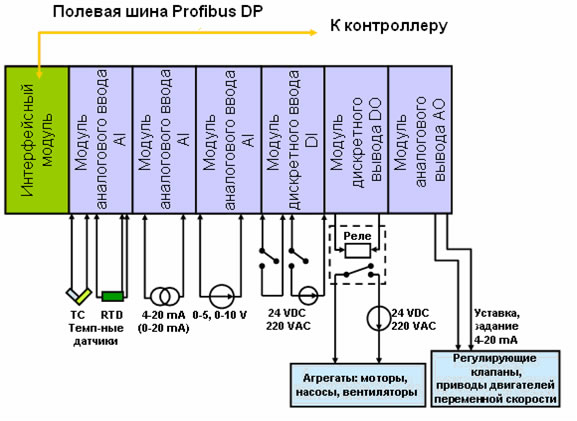
Рис. 2 Схема ввода/вывода с использованием станции распределенной периферии
Количество слотов под установку модулей может быть различным (чаще всего от 2 до 16). Крайний левый слот обычно используется для установки интерфейсного модуля. Блок питания может быть установлен на базовой панели или может быть использован отдельный (внешний) блок. Внутри базовой панели проходят две шины: одна служит для подачи питания на установленные модули; другая — для информационного обмена между модулями.
На рисунке 3 приведено фото узла распределенного ввода/вывода модели 2500 фирмы Eurotherm. На базовой панели расположено 8 модулей ввода/вывода и интерфейсный модуль Profibus DP, блок питания — внешний. На рисунке 4 приведено фото станции распределенной периферии фирмы Siemens ET 200M. На базовой панели 6 сигнальных модулей (модулей ввода/вывода) 1 интерфейсный модуль Profibus DP (крайний слева) и блок питания.
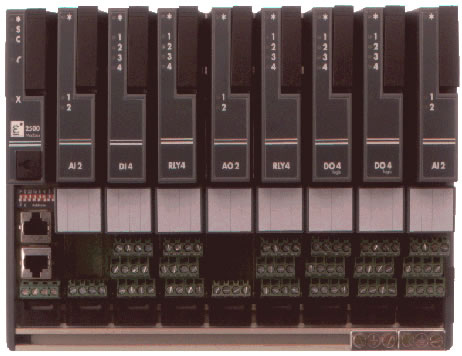
Рис.3 Узел распределенного ввода/вывода фирмы Eurotherm

Рис.4 Станция распределенной периферии ET200M фирмы Siemens
2.1 Сигнальные модули (модули ввода/вывода)
Модули ввода/вывода бывают 4 типов:
1) Сигнальные модули аналогового ввода (AI, analogue input). Они принимают от датчиков, подключенных к его входам, электрические сигналы унифицированного диапазона, например:
- 0-20 или 4-20 mA (токовый сигнал);
- 0-10 V или 0-5 V (потенциальный сигнал);
- сигналы от термопар (TC) измеряются миливольтами;
- сигналы от термосопротивлений (RTD).
Допустим, у нас есть датчик давления с диапазоном измерений 0-6 бар и токовым выходом 4-20 mA. Датчик измеряет давление P, которое в данный момент равно 3 бар. Так как датчик линейно преобразует значение измеряемого давления в токовый сигнал, то на выходе датчика будет:
![]()
Вход сигнального модуля AI, настроенный на те же диапазоны (4-20 mA и 0-6 бар), принимает сигнал 12 mA и делает обратное преобразование:
![]()
Соответствие диапазона электрического сигнала между входом модуля и выходом подключенного к нему датчика обязательно для корректной работы системы.
2) Сигнальные модули дискретного ввода (DI, discrete input). Принимают от датчиков дискретный электрический сигнал, который может иметь только два значения: или 0 или 24 V (в редких случаях 0 или 220 V). Вход модуля DI также может реагировать на замыкание/размыкание контакта в подключенной к нему цепи. К DI обычно подключают датчики контактного типа, кнопки ручного управления, статусные сигналы от систем сигнализации, приводов, позиционирующих устройств и т.д.
Допустим, у нас есть насос. Когда он не работает, его статусный (выходной) контакт разомкнут. Соответствующий дискретный вход сигнального модуля DI находится в состоянии “0”. Как только насос запустили, его статусный контакт замыкается, и напряжение 24 V идет на клеммы входа DI. Модуль, получив напряжение на дискретном входе, переводит его в состояние “1”.
3) Сигнальные модули дискретного вывода (DO, discrete output). В зависимости от внутреннего логического состояния выхода (“1” или “0”) устанавливает на клеммах дискретного выхода напряжение 24 V или 0 V соответственно. Есть вариант, когда модуль в зависимости от логического состояния выхода просто замыкает или размыкает внутренний контакт (модуль релейного типа). Модули DO могут управлять приводами, отсечными клапанами, зажигать светосигнальные лампочки, включать звуковую сигнализацию и т.д.
4) Сигнальные модули аналогового вывода (АО, analogue output) используются для подачи токового управляющего сигнала на исполнительные механизмы с аналоговым управляющим сигналом. Допустим, регулирующий клапан с управляющим входом 4-20 mA необходимо открыть на 50 %. В этом случае на соответствующий выход АO, к которому подключен вход клапана, подается ток I вых:
![]()
Под действием входного тока 12 mA клапан переходит на 50 % открытия.
Соответствие диапазона электрического сигнала между выходом модуля и входом подключенного к нему исполнительного механизма обязательно. Модуль ввода/вывода также характеризуются канальностью – числом входов/выходов, а, следовательно, и количеством сигнальных цепей, которые к нему можно подключить. Например, модуль AI4 — это четырехканальный модуль аналогового ввода. К нему можно подключить 4 датчика. DI16 — модуль дискретного ввода, имеющий шестнадцать каналов. К нему можно подключить 16 статусных сигналов от технологических агрегатов.
В современных системах расположение модулей ввода/вывода на базовой плате строго не регламентировано, и их можно устанавливать в произвольном порядке. Однако один или несколько слотов, как правило, зарезервированы под установку коммуникационного модуля. Иногда возможна установка сразу двух коммуникационных модулей, работающих параллельно. Это делается для повышения отказоустойчивости системы ввода/вывода.
Одним их жестких требований, предъявляемых к современным подсистемам ввода/вывода, является возможность “горячей” замены модулей без отключения питания (функция hot swap).
Коммуникационные модули обеспечивают обмен данными между ПЛК, станциями распределенной периферии, интеллектуальными датчиками и исполнительными устройствами. Модули поддерживают один из коммуникационных протоколов:
- Profibus DP;
- Profibus PA;
- Modbus RTU;
- HART;
- CAN и др.
Обмен информацией, как правило, осуществляется с использованием механизма ведущий-ведомый (master-slave). Только ведущее устройство на шине может инициировать обмен данными. Ведомые устройства пассивно прослушивают все данные, идущие по шине, и только в случае получения запроса от ведущего устройства отправляют обратно ответ. Каждое устройство на шине имеет свой уникальный сетевой адрес, необходимый для однозначной идентификации. Узлы ввода/вывода, как правило, являются ведомыми устройствами, в то время как контроллеры — ведущими.
На рисунке 5 показана цифровая полевая шина, объединяющая один контроллер (с монитором) и четыре узла ввода/вывода. Каждое устройство, подключенное к шине, имеет свой уникальный адрес. Пусть, например, ПЛК с адресом 1 хочет считать показание датчика давления. Датчик подключен к станции распределенной периферии с сетевым адресом 5, к модулю AI, расположенному в слоте 6, входной канал 12. Тогда ПЛК формирует и отправляет по шине запрос следующего содержания:
![]()
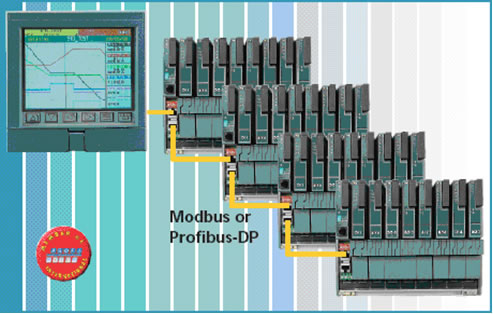
Рис. 5 Подключение ПЛК и станций распределенной периферии к полевой шине
Каждый узел прослушивает все запросы на шине. Узел 5 узнает, что запрос адресован ему, считывает показание датчика и формирует ответ в виде следующего сообщения:
![]()
Контроллер, получив ответ от ведомого устройства, считывает поле данных с датчика и выполняет соответствующую обработку. Пусть, например, после обработки данных ПЛК вырабатывает управляющий сигнал на открытие клапана на 50 %. Управляющий вход клапана подключен к второму каналу модуля AO, расположенного в слоте 3 узла 7. ПЛК формирует команду следующего содержания:
![]()
Узел 7, прослушивая шину, встречает адресованную ему команду. Он записывает уставку 50 % в регистр, соответствующий слоту 3, каналу 2. При этом модуль AO формирует на выходе 2 необходимый электрический сигнал. После чего узел 7 высылает контроллеру подтверждение успешного выполнения команды.
![]()
Контроллер получает ответ от узла 7 и считает, что команда выполнена. Это всего лишь упрощенная схема взаимодействия контроллера с узлами ввода/вывода. В реальных АСУ ТП, наряду с рассмотренными выше, используется множество диагностических, управляющих и сервисных сообщений. Хотя сам принцип “запрос-ответ” (“команда-подтверждение”), реализованный в большинстве полевых протоколов, остается неизменным.
Напомним еще раз, что наряду с рассмотренной выше схемой ввода/вывода в АСУ ТП могут применяться схемы ввода/вывода через сигнальные модули, установленные непосредственно в слоты (или на профильную рейку) ПЛК (без использования станций распределенной периферии).
2.2 Обработка аналоговых сигналов в процессе ввода в контроллер
Для ввода аналогового сигнала в контроллер и его последующей обработки, он должен быть оцифрован, т.е. преобразован в цифровой код. Процесс обработки сигнала от аналогового датчика до использования в контроллере схематически показан на рисунке 6.
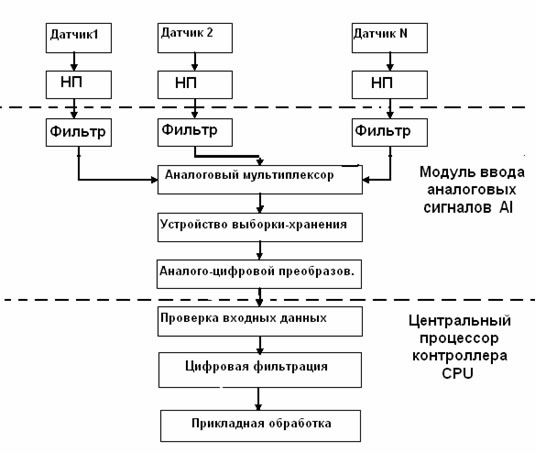
Рис.6 Схема обработки аналогового сигнала при вводе в контроллер
Сигналы от датчиков доводятся до нормированного уровня (4 – 20 mA, 0 – 10 V) нормирующими преобразователями (НП) и проходят этап аналоговой фильтрации. Аналоговые фильтры позволяют устранить высокочастотные шумы, которые могут быть вызваны, например, электромагнитными помехами при передаче сигнала по кабелю.
Необходимо отметить, что сигнал должен быть отфильтрован от высокочастотных шумов до цифровой обработки в контроллере. Это является необходимым условием правильного выбора периода дискретизации при вводе сигнала. Дело в том, что для адекватного восстановления исходного аналогового сигнала по дискретным данным, частота дискретизации должна не менее чем в два раза превышать наивысшую частоту в спектральном разложении вводимого сигнала (спектральный состав может быть получен в результате разложения сигнала в ряд Фурье). При более низкой частоте дискретизации в восстановленном сигнале появится ложная составляющая (так называемая псевдочастота), которую невозможно детектировать и устранить на этапе цифровой обработки. Наличие высокочастотного шума потребует очень высокой частоты дискретизации (частоты опроса датчика), что будет неоправданно загружать контроллер.
Отфильтрованные сигналы от датчиков поступают на аналоговый мультиплексор, основное назначение которого – последовательное подключение сигналов от N датчиков к устройству выборки-хранения (УВХ) и аналого-цифровому преобразователю (АЦП) для дальнейшей обработки. Такая схема позволяет существенно снизить общую стоимость системы ввода за счет применения только одного УВХ и АЦП на все каналы аналогового ввода. УВХ запоминает мгновенное значение сигнала в момент подключения датчика и удерживает его постоянным на своем выходе на время преобразования в АЦП.
В контроллере введенный цифровой сигнал проверяется на физическую достоверность и, при необходимости, проходит этап цифровой (программной) фильтрации.